
Продукция





-
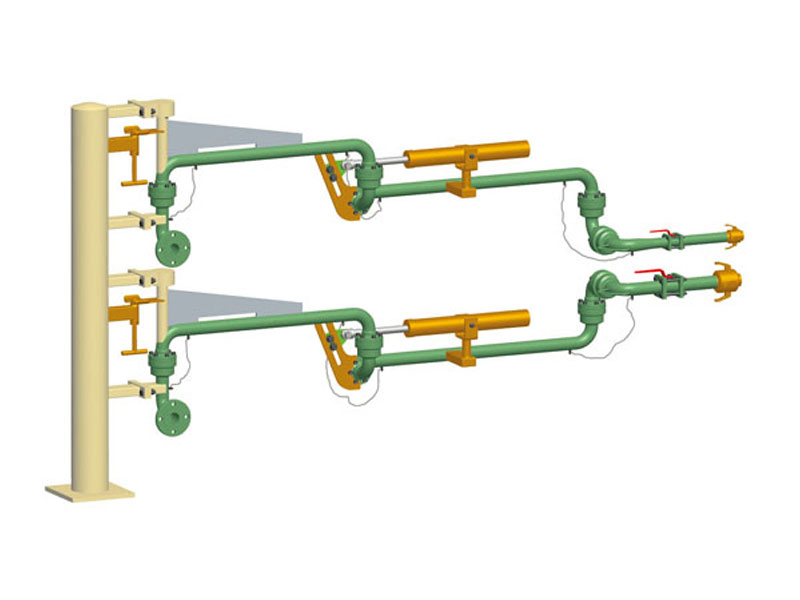
Устройство нижнего налива AL2503
-
Устройство нижнего налива AL2404
-
Устройство нижнего налива AL1402
-

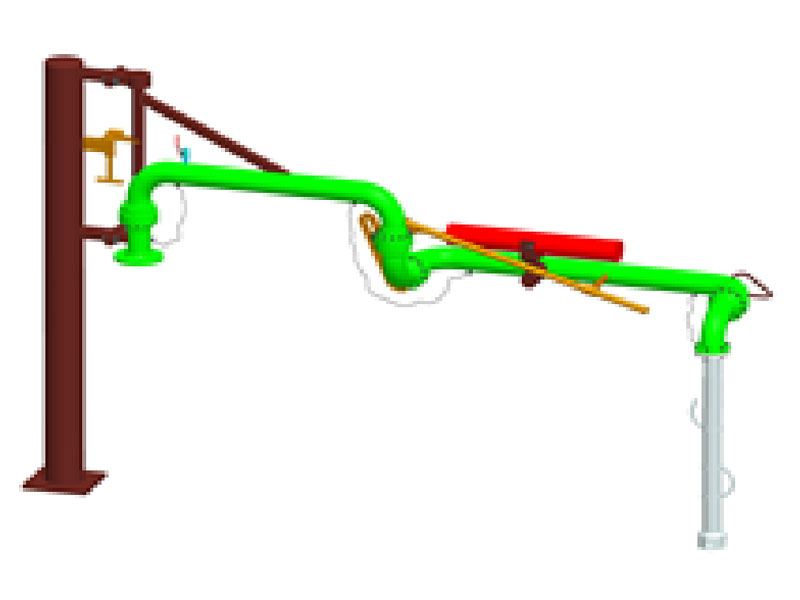
Устройство верхнего налива AL1401
-

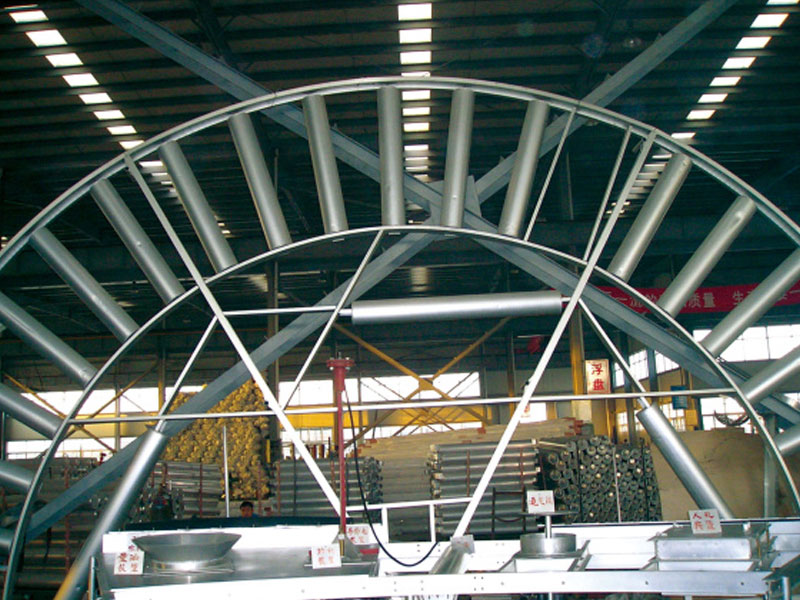
Трап-сходня Башенного Типа
-
Устройство верхнего налива AL1512
-

Устройство нижнего налива AL1403
-

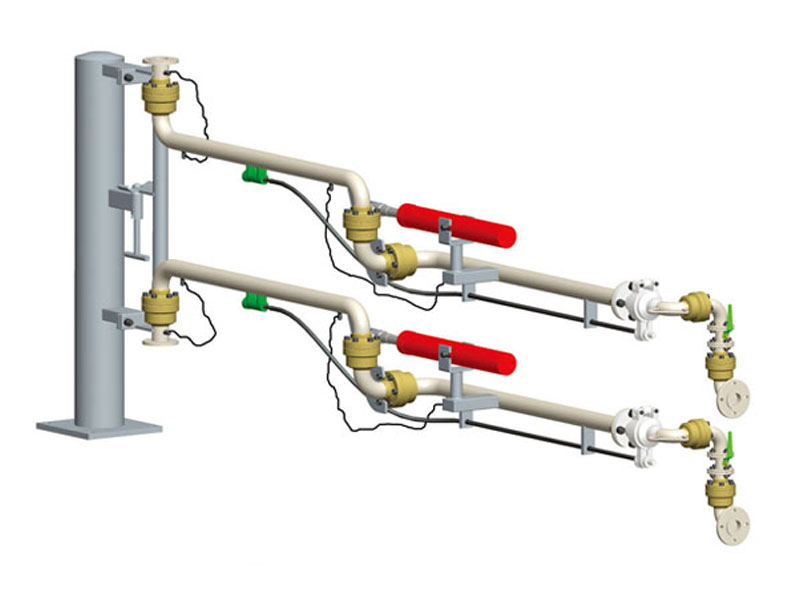
Модульное решение для налива в автоцистерны
-

МОРСКОЙ СТЕНДЕР(HG/T21608-2012)
-

Трап-сходня Колонного Типа
-

БЫСТРООТДАЮЩИЕСЯ ШВАРТОВЫЕ ГАКИ
-
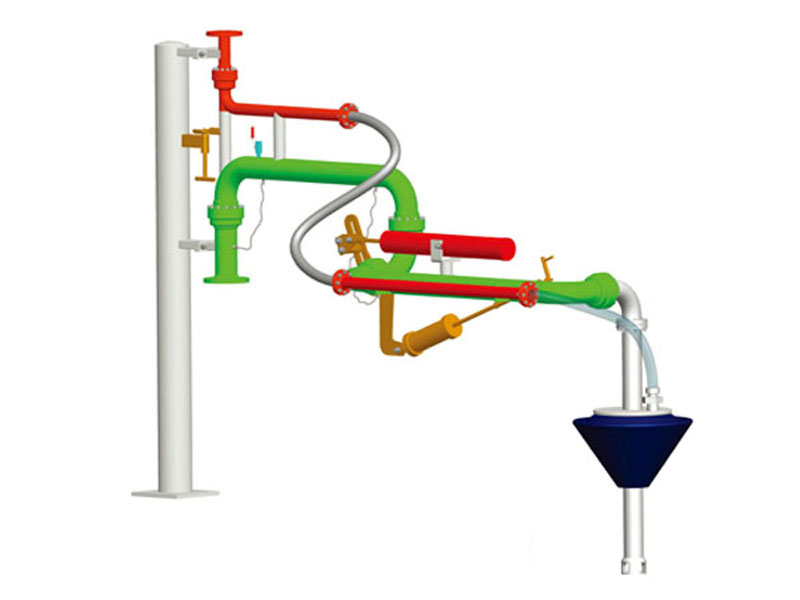
Закрытое устройство верхнего налива AL1412
-
Плавающая крыша резервуара для нефтепродуктов
-
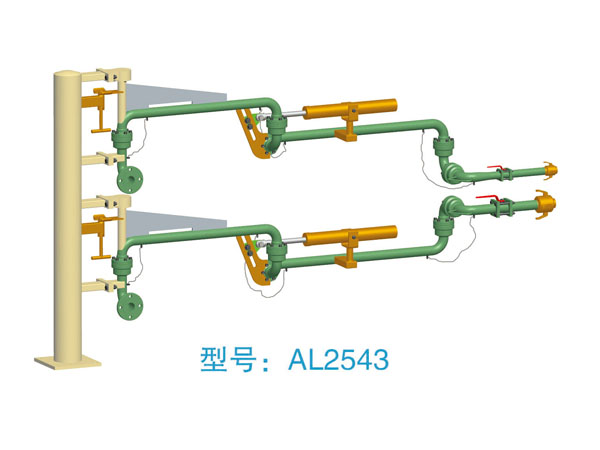
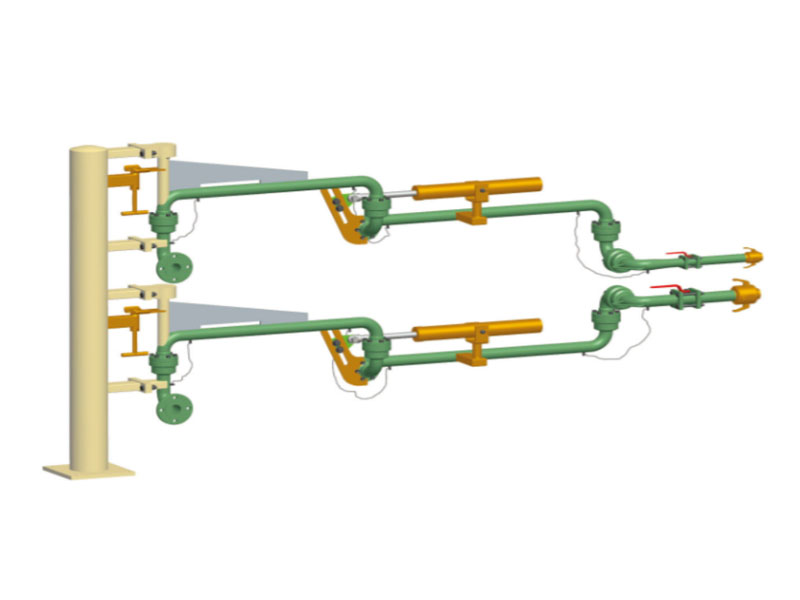
Устройство нижнего налива AL2543




Автоматическая установка налива
1. Обзор системы Данная система представляет собой комплекс интеллектуальных решений по наполнению для интеллектуального управления, является первым в Китае и первым в отрасли, эффективно решает проблемы в отечественной промышленности, заполняет пробелы в области автоматизации и интеллектуализ...
Описание
маркер
1. Обзор системы
Данная система представляет собой комплекс интеллектуальных решений по наполнению для интеллектуального управления, является первым в Китае и первым в отрасли, эффективно решает проблемы в отечественной промышленности, заполняет пробелы в области автоматизации и интеллектуализации заполнения нелетучих жидкостей. В системе применяются машинное зрение, система управления и комплектующее информатизированное программное обеспечение, которые в основном применяются в сценарии погрузки верхнего открытого погрузочного наливного рукава, что повышает интеллектуальный уровень наполнения наливного рукава на предприятии.
2. Инструкция по эксплуатации автоматического наливного рукава
Водитель загоняет машину в зону погрузки, система подсказывает, пожалуйста, полностью остановите автомобиль
Водитель кладет ключ в диспетчер, надежно подключает электростатический хомут и ставит упор под колеса
В зону сканирования карты IC, сканируйте для получения товаров
Нажмите кнопку пуска, наливной рукав автоматически состыкуется, начинается погрузка.
После завершения погрузки наливной рукав автоматически возвращается
Водитель устанавливает электростатический хомут и упоры под колеса на прежнее место, берет ключ и заводит автомобиль
Завершение погрузки
3. Процесс автоматического позиционирования
Заход цистерны в зону погрузки
Снимок камеры для считывания координат отверстия ферментера
Фоновое программное обеспечение вычисляет расстояние перемещения
Сервосистема приводит в движение наливной рукав
При достижении заданных координат наливной рукав вставляют в горловину цистерны
Позиционирование завершено , погрузка начинается
4. Болевые точки традиционного режима работы
В настоящее время на большинстве заводов налив жидкости осуществляется путем визуального контроля уровня жидкости в цистерне работником поста на автоцистерне с целью определения заполненности, этот метод имеет большие погрешности;
Кроме того, необходимо вручную вставить наливной рукав в горловину цистерны, в этом случае рабочие обладают большой трудоемкостью и высотой работы (рабочая платформа обычно находится на высоте более 5м от земли), рабочая среда является опасным химическим веществом, обладающим сильной коррозионной и вредной свойствами, поэтому невозможно эффективно обеспечить личную безопасность оператора, в случае неосторожной работы может привести к человеческим жертвам.
Отсутствие статического электричества, легко вызвать пожар
Ручное наполнение, большие трудности в эксплуатации, избыточное загрязнение окружающей среды
Погрешность наполнения, нелегко регулировать
Рабочие опасности (высокая рабочая платформа, опасные химические вещества), отсутствие обеспечения безопасности
Визуальная количественная оценка, низкая эффективность, большая погрешность, большая трудоинтенсивность
Однотрубная работа, низкая эффективность, высокая себестоимость
5. Преимущества системы
Обеспечить автоматизированное дистанционное управление всем процессом взвешивания и наполнения, уменьшить трудоинтенсивность персонала, повысить эффективность и точность наполнения;”
Вместо ручного управления вставкой наливного рукава в горловину цистерны используется технология «машинное зрение + система управления», впервые примененная в отечественной промышленности, что повышает эффективность вставки наливного рукавв:
Применять видеоанализ AI для анализа состояния автомобилей и персонала на месте погрузки, для обеспечения безопасной защиты процесса наполнения.
Применять самостоятельное создание или штуцер для обмена данными с системой взвешивания автовесов и системой печати терминала контроля качества. Разрушить остров данных.
| Наименование оборудования | Интеллектуальный погрузочный наливной рукав | Характеристика и тип | TL1303V9 |
| Диаметр наливного рукава | DN50-DN150 | Материал | Углеродистая сталь, 304, 316L |
| Время позиционирования | 30 с | Форма движения | Независимое управление, независимое движение по трям осям (XYZ) |
| По направлению ширины от края эстакады | 2000 мм | Высота эстакады | 2850мм |
| Диапазон движения наливного рукава параллелен направлению эстакады | 2000 мм | Диапазон движения наливного рукава перпендикулярен направлению эстакады | 1000мм |
| Способ работы наливного рукава | Автоматический | Подача энергии | Сервомотор |
| Способ стыковки с горловиной цистерны | Автоматический | Высота монтажа наливного рукава | 5800 мм вверх от плоскости отсчета |
| Режим управления | Контроллер движения, программируемый контроллер | Способ связи | TCP/IP, RS485 с возможностью передачи сигнала |
Создает модель движения наливного рукава и алгоритм распознавания и позиционирования вместо ручной работы в сочетании с машинным зрением, связью между вычислительными комплексами верхнего и нижнего положения, системой управления и другими технологиями для достижения интеллектуального наполнения в один клик.
На основе взаимодействия механизма открытия крышки с сигналом платформы автоматического контрапункта осуществляется автоматическое открытие и закрытие крышки цистерны, вместо ручного подъема на вершину цистерны для вручную открытия крышки.
После завершения погрузки, автоматически извлекается остаточная среда из наливного рукава во избежание загрязнения окружающей среды, вместо традиционной ручной подвески трубы
На основе системы управления и местных приборов осуществляются точное управление объемом наполнения в процессе наполнения и более надежная защита многократной безопасной блокировки, чтобы достичь цели дозированного автоматизированного наполнения.
Получение информации о заказе на основе распознавания номерных знаков, инфракрасное предотвращение мошенничества в верхнем и нижнем весах автомобиля, мониторинг видео в режиме реального времени, оповещение системы голосового вещания, достижение взвешивания без дежурства в весовой будке, быстрое и точное удаленное завершение всего процесса взвешивания.
связаться с нами
Сопутствующие популярные продукты
Устройство нижнего налива AL1403
Технические параметры: Тип AL1403 Спецификация DN50, DN80, DN100, DN125, DN150 ...
Модульное решение для налива в автоцистерны
1. Обзор На нефтеперерабатывающих заводах, химических заводах, нефтехимических складах и других п...
Устройство верхнего налива AL1401
Технические параметры: Тип AL1401 Примечания Спецификация DN50, DN80, DN100, DN...
Закрытое устройство верхнего налива AL1412
Технические параметры: Тип AL1412 Спецификация DN50/DN25, DN80/DN25, DN100/DN50 ...
Устройство нижнего налива AL2543
Технические параметры: Тип AL2543 Спецификация DN50/DN25, DN80/DN50 Применимая...
БЫСТРООТДАЮЩИЕСЯ ШВАРТОВЫЕ ГАКИ
Скородействующий отцепной крюк – это специальное оборудование, которое устанавливается на причале для скручивания и швартовки судов и является альтернативой традиционным палам. Данная продукция не только снижает интенсивность труда рабочих, повышает эффективность труда, но и обеспечивает безопасность, надежность и долговечность причалов по сравнению с палами.
Трап-сходня Колонного Типа
Посадочный трап – это устройство, которое позволяет экипажу безопасно и беспрепятственно подняться на борт судна и спуститься с него во время работы танкера современного крупного нефтяного причала в причальном набережной. Традиционное посадочное устройство выполняется с помощью собственного трапа.
Трап-сходня Башенного Типа
Посадочный трап – это устройство, которое позволяет экипажу безопасно и беспрепятственно подняться на борт судна и спуститься с него во время работы танкера современного крупного нефтяного причала в причальном набережной. Традиционное посадочное устройство выполняется с помощью собственного трапа.
Устройство нижнего налива AL1402
Технические параметры: Тип AL1402 Спецификация DN50、DN80、DN100、DN125、DN150 D...
МОРСКОЙ СТЕНДЕР(HG/T21608-2012)
Рычаг погрузки и разгрузки жидкости для судов предназначен для передачи жидкого или газообразного продукта между трубопроводной системой причала и джонки. Рычаг транспортировки нефти для судов, разработанный и произведенный нашей компанией, может быть связан с судном в нормальном диапазоне дрейфа джонки в процессе передачи, кроме того, с помощью системы мониторинга диапазона, когда коллектор джонки дрейфует из нормального рабочего диапазона, обеспечивается звуковая и световая сигнализация, а также осуществляется аварийное отделение рычага погрузки и разгрузки от корпуса судна при оснащении системой аварийного отделения.
Устройство верхнего налива AL1512
Технические параметры: Тип AL1512 Спецификация DN50/DN50 Применимая среда Под...
Устройство нижнего налива AL2503
Технические параметры: Тип AL2503 Спецификация DN80,100 Применимая среда Подх...
Устройство нижнего налива AL2404
Технические параметры: Тип AL2404 Спецификация DN100 Применимая среда Подходит...
Плавающая крыша резервуара для нефтепродуктов
1. Обзор Согласно «Руководству по энергосберегающему проектированию нефтехранилищ» и другим соотв...